

PRODUCTS
Controller, Drive, Motor, IO, Vibration Isolator 등 자동화 시장에서 필요로 하는 제어 토탈 솔루션 제공




-
 범용 Rotary/Linear Servo Drive & Motor
범용 Rotary/Linear Servo Drive & Motor

-
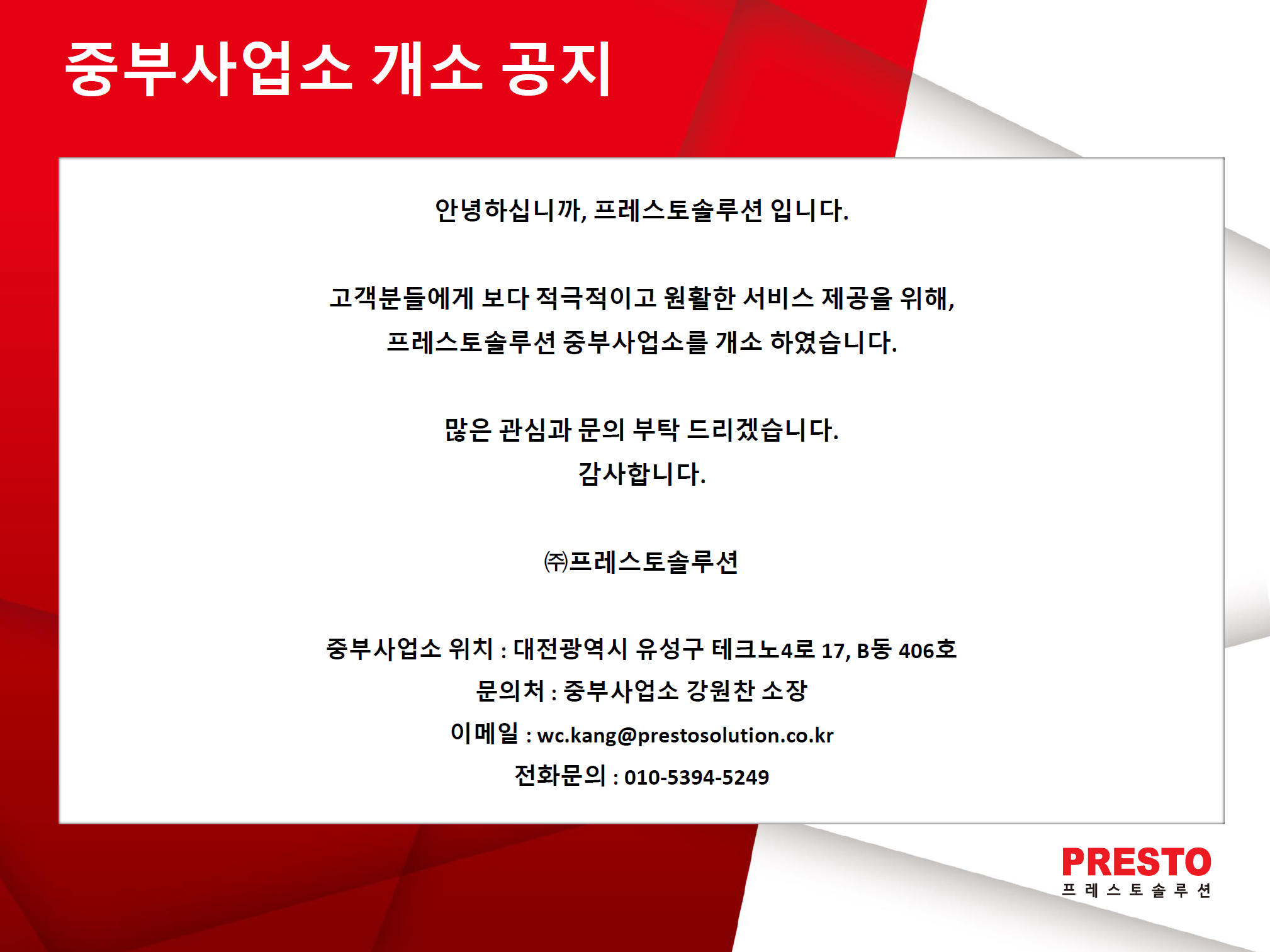
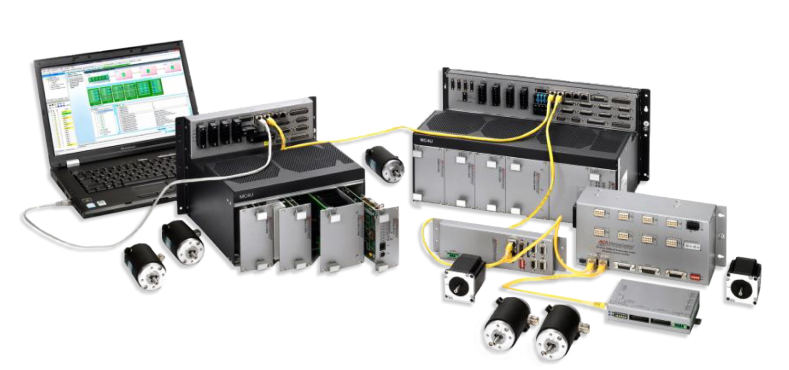
 모션 제어를 중점으로 한 로터리/리니어 서보 모터, 드라이브 등의 자동화 솔루션
모션 제어를 중점으로 한 로터리/리니어 서보 모터, 드라이브 등의 자동화 솔루션

-
 Panel Mount/Vehicle/PCB Mount 형태의 Compact한 드라이브 솔루션
Panel Mount/Vehicle/PCB Mount 형태의 Compact한 드라이브 솔루션

-
 EtherCAT 통신 관련 Embedded PC, Bus terminals, TwinCAT automation software 솔루션
EtherCAT 통신 관련 Embedded PC, Bus terminals, TwinCAT automation software 솔루션

-
 Closed/Open Loop System(스텝 모듈), I/O 솔루션
Closed/Open Loop System(스텝 모듈), I/O 솔루션

-
 물류/생산 자동화 Linear Moving Magnet 솔루션
물류/생산 자동화 Linear Moving Magnet 솔루션

-
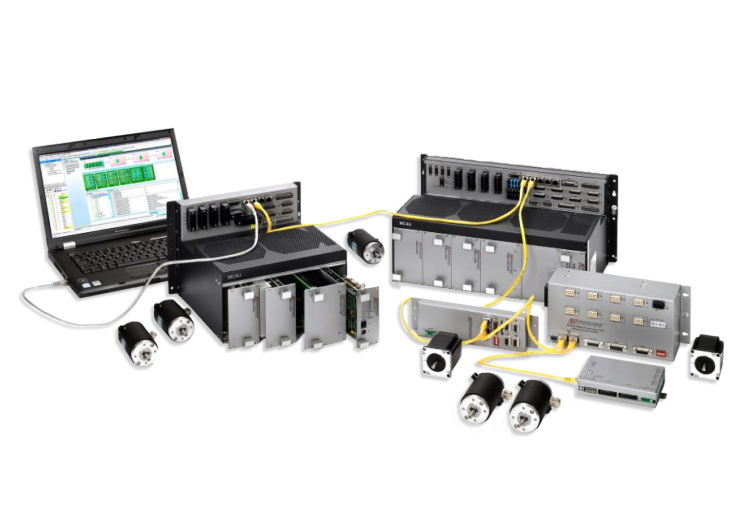
 고속/정밀 Picker Module & 모션 제어 솔루션
고속/정밀 Picker Module & 모션 제어 솔루션
-
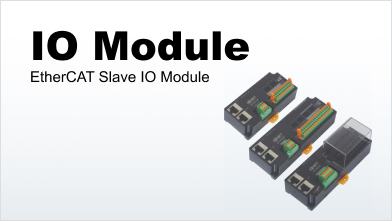 EtherCAT Slave Digital & Analog IO Modules
EtherCAT Slave Digital & Analog IO Modules
-
 Total Motion System Accessories
Total Motion System Accessories

PRESTO NEWS
프레스토솔루션 소식을 전달합니다.